x→yという対応に対してこの逆のy→xという対応を元の関数の「逆関数」と呼ぶ。
たとえば${y}=2{x}$、すなわちあるxに対しその2倍を対応させる関数の逆関数は${x}={1\over 2}{y}$、すなわち、あるyに対しその${1\over 2}$倍を対応させる関数である。この${x}={1\over 2}{y}$という書き方では、独立変数がyで従属変数がxだということになる。前にも書いたように「独立変数にx、従属変数にyを使うことが多い」のは単なる慣習であり、こだわる必要は何もない。もしどうしても「独立変数はx、従属変数はy」という形にしたければ、「ここでxとyを取り替えます」と宣言した上で${y}={1\over 2}{x}$と書き直せばよい。
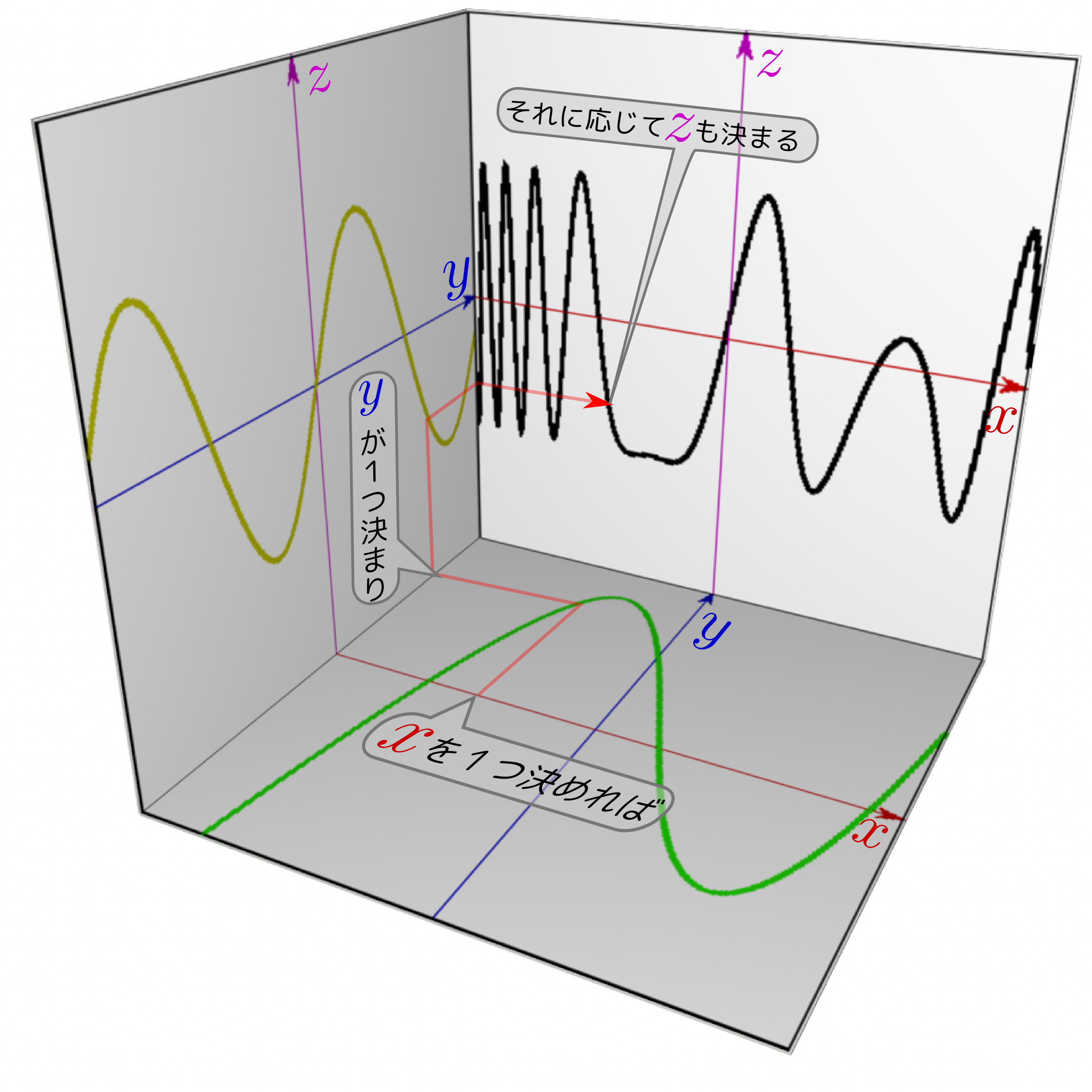
$y=f(x)$の逆関数が$x=f^{-1}(y)$だとすると、それ逆じゃなくて元のままじゃないですか?
ええ、この式自体は全く、同じ式です。この場合の「逆」ってのは最初は「$x$が独立変数(先に決まる数)で$y$が従属変数(後から決まる数)」だったのに、後で「$y$が独立変数(先に決まる数)で$x$が従属変数(後から決まる数)」というふうに、独立←→従属の役割分担が「逆」になったというふうに理解してください。
逆関数を考える時にも定義域と値域に対する注意は必要である。たとえば、「${y}={x}^2$という関数の逆関数は${x}=\sqrt{{y}}$」と言いたくなるが、これは${x}\geq0$という範囲で考えないと正しくない。${x}<0$の範囲であれば、「${y}={x}^2$という関数の逆関数は${x}=-\sqrt{{y}}$」となる。つまりxの領域によって逆関数の形を変えてやらなくてはいけない(これはすぐ下で述べる「関数が1対1か?」という問題のせいでもある)。また、${y}=\sin{{x}}$の逆関数は${x}=\arcsin {y}$と書く($\arcsin$は「アークサイン」と読む)のだが、${x}=\arcsin {y}$のyは$-1\leq{y}\leq1$の範囲になくてはいけない(こう書いた時にはyは独立変数なので、この範囲は「定義域」である)。
もう一つ、逆関数を考える時に気をつけなくてはいけないのは、元の関数が「1対1対応」かどうか、という点である。たとえば${y}=a{x}$(逆関数は${x}={1\over a}{y}$または${y}={a\over {x}}$(逆関数は${x}={1\over a{y}}$)などは、一つのxに対応するyはただ一つであり(でなかったらそもそも関数ではない)、さらに一つのyに対応するxもただ一つである。
しかし、上でも例にした${y}={{x}^2}$はそうではない。たとえば${x}=1$でも${x}=-1$でも${y}=1$になってしまうから、x二つとy一つが対応している(${x}=0$を除く)。このような場合には${x}\to {y}$は関数であるが、${y}\to{x}$は関数ではない。このような場合は前に書いたように、定義域を制限するか、代表を一つ取り出すことでyに対してxが一つだけ決まるようにする。${y}={{x}^2}$の場合であれば、${x}\geq 0$の範囲しか考えないことにすればよい。
より深刻な「1対1対応でない例」が${y}=\sin{{x}}$の逆関数${x}=\arcsin {y}$である。${y}=\sin{{x}}$は$x$に$x+2n\pi$($n$は整数)を代入しても値が変わらない。つまり、y一つ(ただし、$-1\leq {y}\leq 1$)に対して無限個のxが対応してしまう。
では、ここで${y}=\sin {x}$と${x}=\arcsin{y}$のグラフを描いてみよう。
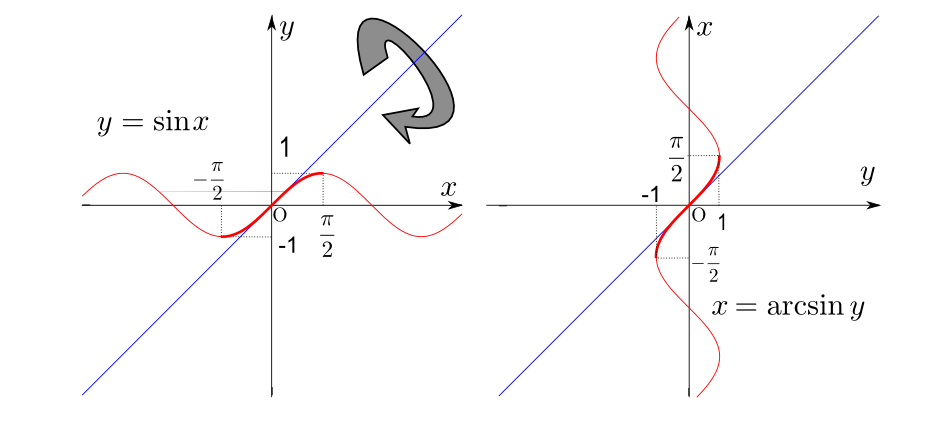
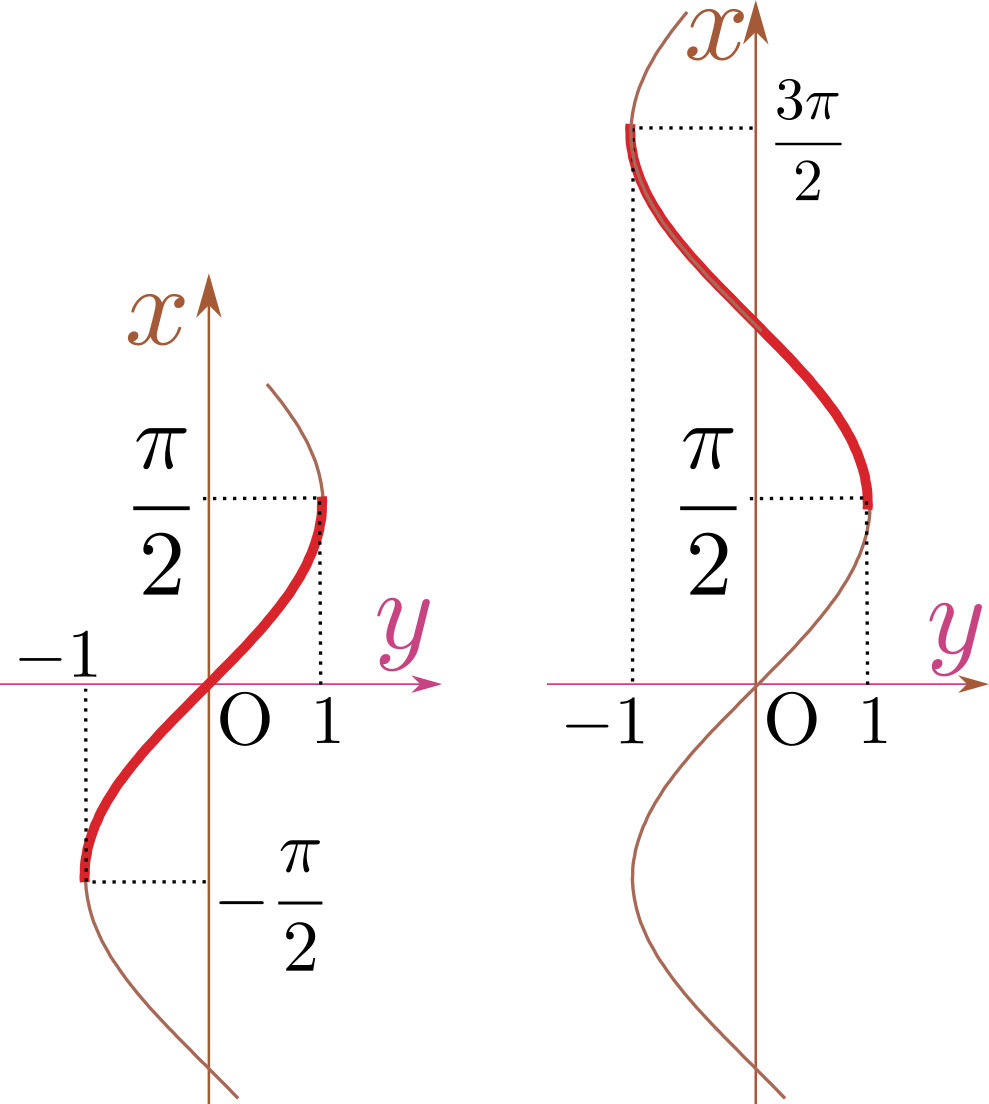
関数と逆関数のグラフの関係は、(独立変数と従属変数の役割を取り替えるものだから)上の図に示したように「${y}={x}$の線、つまり斜め45度$\left({\pi\over 4}\right)$の線を対称線にして折り返す」ことで得られる。しかしこのままでは、${x}=\arcsin{y}$の方が関数になっていない。一つのyに対しxがたくさんあるからである。そこでグラフのうち太い線にした部分$-{\pi\over 2}\leq {x}\leq {\pi\over 2}$だけを取り出して、残りは捨てることにする。結果、${x}=\arcsin{y}$の定義域は$-1\leq {y} \leq 1$、値域は$-{\pi\over 2}\leq {x}\leq {\pi\over 2}$だということになる(こうしないと一つのyに対して一つのxが対応しない)。
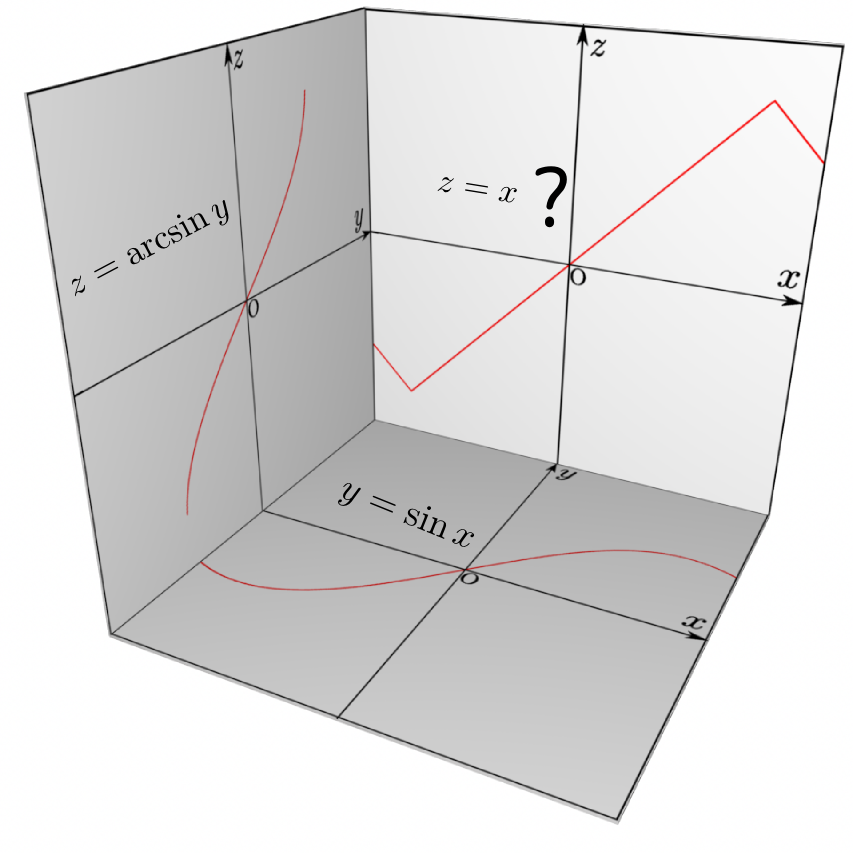
この二つの関数を合成するとこれはx=xに戻る…と期待したいところだが、そうはいかない。右に${y}=\sin {x}$と${z}=\arcsin{y}$(まだ元に戻るとは限らないから左辺はxにせず新しい変数zとした)のグラフが合成されるとどのようになるかを描いた。順番に見ていくと、${y}=\sin {x}$という関数の「答え」は$-1\leq {y} \leq 1$の範囲である。さらに${z}=\arcsin {y}$という関数による「答え」は$-{\pi\over 2}\leq {z}\leq {\pi\over 2}$に制限されてしまう。
つまり元々のxの範囲は任意の実数であったのに、二つの関数を(元に戻ると期待して)作用させた結果、$-{\pi\over 2}\leq {z}\leq {\pi\over 2}$に制限された答えが返ってきたということである。よって、この範囲であれば確かに$\arcsin$は$\sin$の逆関数になっている(グラフの形からわかるように、1対1対応にするためにはこんなふうに変数の領域を制限する他はない)。逆関数を作る時にはこの点に注意が必要である。
$x$の範囲ですが、$\sin$が下がるところを使ってもよいんですか?
${\pi\over2}$<$x$<${3\pi\over2}$ってことね。もちろんいいです。その場合、グラフは下の右側のようになります(比較してください)。
こういう逆関数も、状況によっては必要になります(たとえば最初から角度がこの範囲にあるとわかっている場合など)。まぁたいていの場合、欲しい角度は$x=0$付近ですが。
${y}=\cos{x}$の逆関数は${x}=\arccos{y}$である($\arccos$は「アークコサイン」と読む)。こちらも変数の範囲に注意が必要だが、ここではグラフだけを載せておこう。
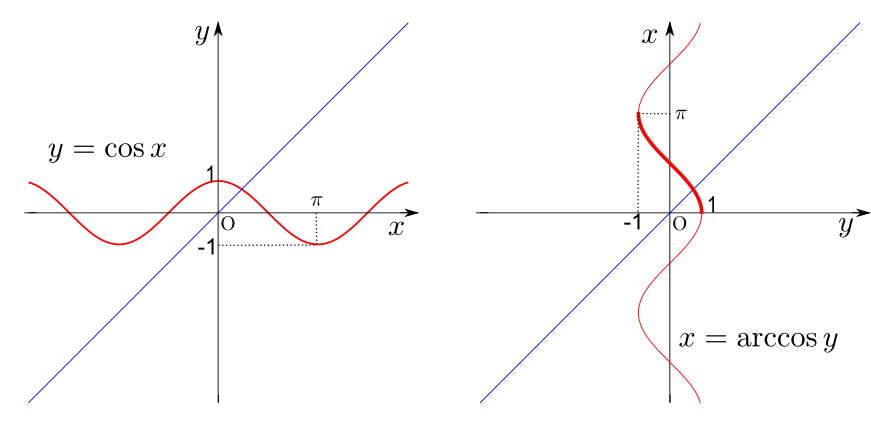
$y=\arccos x$の値域は$0\leq y \leq \pi$にすることが多い。$\tan$の逆関数である$y=\arctan x$もある。
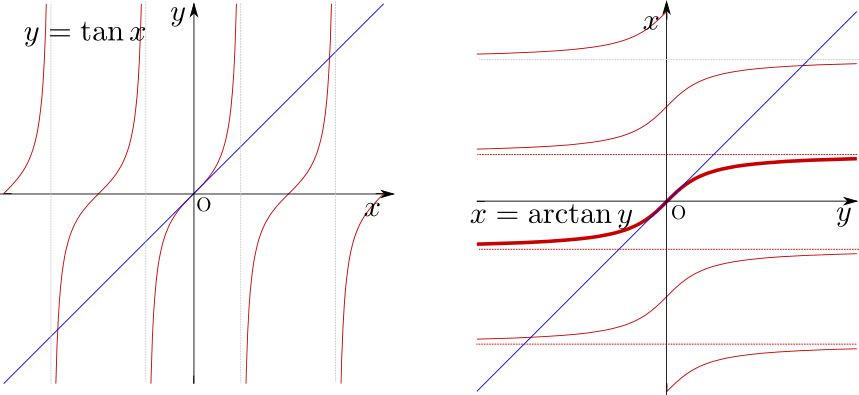
$\arctan$は「アークタンジェント」と読む。値域は$-{\pi\over 2}<{y}<{\pi\over 2}$とすることが多い。グラフからわかるように、$\tan {x}$のグラフは同じ形の繰り返しだが、その一つだけを取り出して考えないと、逆関数は定義できない。
arctanって、そんなふうに区切ってしまっても使い途あるんですか。
arctanを使う場合って、最初からある程度角度の範囲がわかっている場合が多いです。たとえば前にも説明した東京スカイツリーの高さを求める場合、
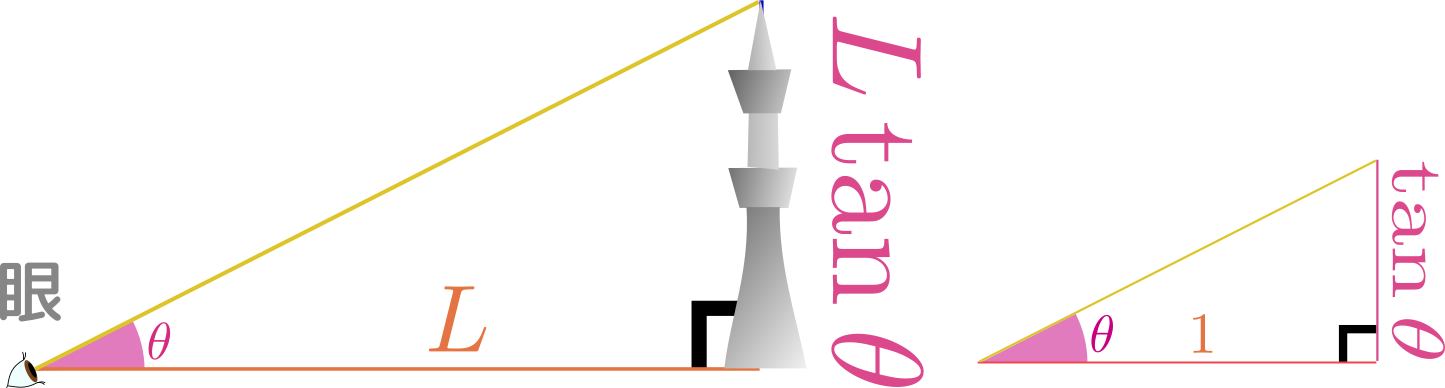
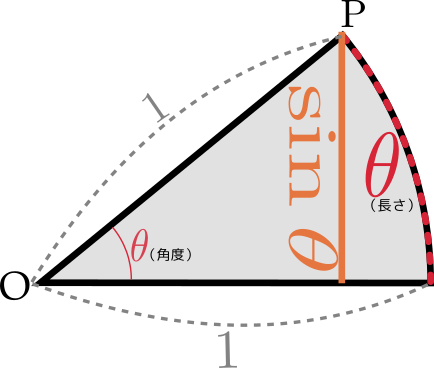
で距離$L$と角度$\theta$がわかっていれば高さ$h=L\tan\theta$がわかるという話だったけど、逆に$L,h$がわかっていて角度$\theta$を求めたい、ってときは$\arctan$の出番なわけです。このとき、$\theta$が0から${\pi\over2}$の間の角度だということは最初からわかっているから、この範囲で求められれば十分なわけです。
このあとテキストには「関数らしくない関数」の話がありますが、そこは飛ばします(テキスト読んでおいてください)。
今日は質問もよく出て、楽しい授業でした!