行列式の幾何学的意味
$2\times2$行列の行列式は「列ベクトル2本の作る平行四辺形の体積」であり、$3\times3$行列の行列式は「列ベクトル3本の作る平行六面体の体積」であった。類推から、$N\times N$行列の行列式は「列ベクトル$N$本の作る$N$次元立体の`体積'」となる。より正確に言うと行列式は「その行列の表す線形写像によってその空間の体積が何倍になるか」を表す量だと言える。2次元の場合で描いたのが下の図である。
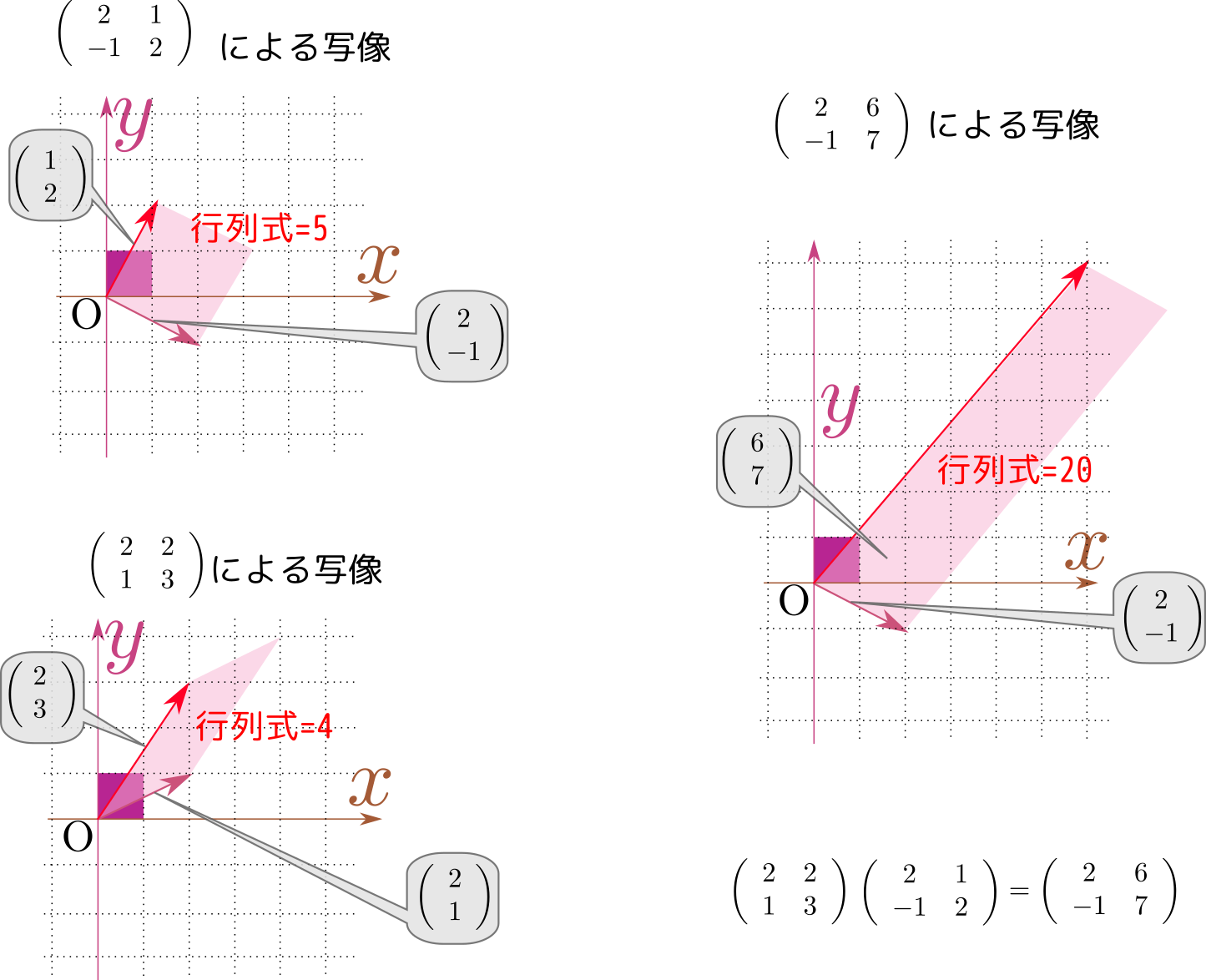
このことから直観的に、以下が成り立つことがわかる。
任意の同じ次元の正方行列$\mt{A},\mt{B}$について以下が成り立つ。 \begin{align} \det\kakko{\mt{AB}}=\det\kakko{\mt{A}}\det\kakko{\mt{B}} \end{align}
これを具体的に行列式の定義に代入して計算して確かめようとすると、少し面倒だが、行列式の$N$重線形性を使うと比較的計算量少なく証明できる。
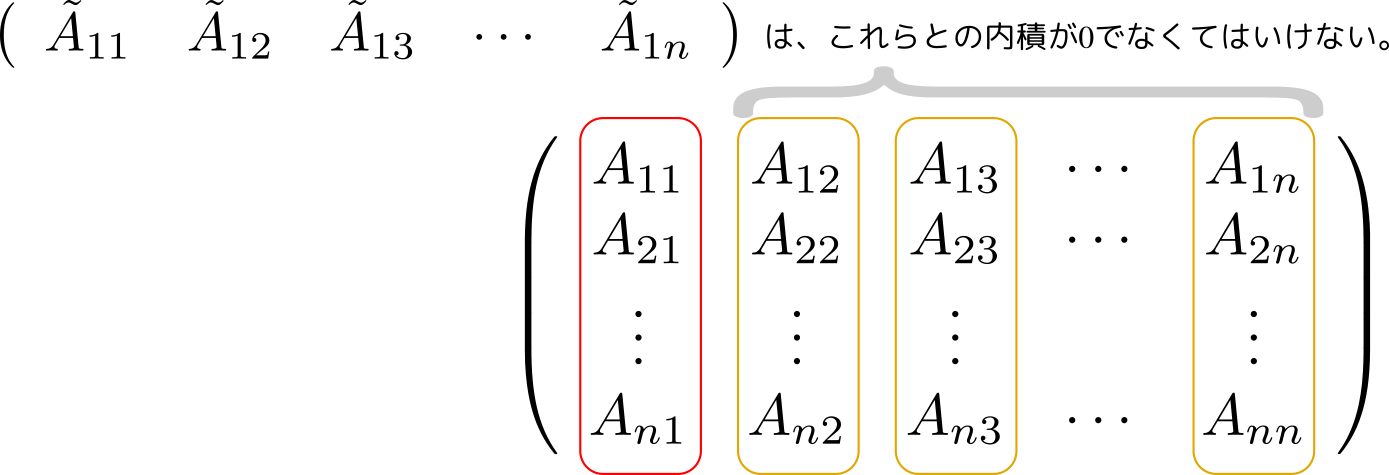
まず行列を$\mt{A}$なら$\mtx[c@{\,}c@{\,}c@{\,}c]{\tatevec{\vec A_1}&\tatevec{\vec A_2}&\cdots&\tatevec{\vec A_\sN}}$、$\mt{B}$なら$\mtx[c@{\,}c@{\,}c@{\,}c]{\tatevec{\vec B_1}&\tatevec{\vec B_2}&\cdots&\tatevec{\vec B_\sN}}$のように列ベクトルを並べたものとみなして考えよう。同様に、行列の積は \begin{align} \det\kakko{\mt{AB}}=\det\Kakko{\tatevec{\mt{A}\vec B_1},\tatevec{\mt{A}\vec B_2},\cdots,\tatevec{\mt{A}\vec B_\sN}} \end{align} と表現できる。ここで、$\mt{A}\vec B_k$というベクトルは \begin{align} \mt{A}\vec B_k=\sum_{\dum{i}=1}^N\vec A_{\dml{i}} B_{k\dmr{i}} \end{align} のように$\vec A_*$の線形結合で表現できることを思い出す。
よって、 \begin{align} \det\kakko{\mt{AB}}= \det\Kakko{ \sum_{\dum{j_1}}\vec A_{\dml{j_1}}B_{1\dmr{j_1}}, \sum_{\dum[ycolor]{j_2}}\vec A_{\dml[ycolor]{j_2}}B_{2\dmr[ycolor]{j_2}}, \cdots, \sum_{\dum[zcolor]{j_\sN}}\vec A_{\dml[zcolor]{j_\sN}}B_{\sN\dmr[zcolor]{j_\sN}}} \end{align} なのだが、$N$重線形性を使えば$\vec A_j$の係数であるところの$B_{ij}$をどんどん外に出していく。結果は \begin{align} \det\kakko{\mt{AB}}= \sum_{\dum{j_1},\dum[ycolor]{j_2},\cdots\dum[zcolor]{j_\sN}=1}^N B_{1\dml{j_1}}B_{2\dml[ycolor]{j_2}}\cdots B_{\sN\dml[zcolor]{j_\sN}}\det\Kakko{\vec A_{\dmr{j_1}},\vec A_{\dmr[ycolor]{j_2}},\cdots,\vec A_{\dmr[zcolor]{j_\sN}}} \end{align} の形になる。ここで、後ろの$\det\Kakko{\vec A_{\dmr{j_1}},\vec A_{\dmr[ycolor]{j_2}},\cdots,\vec A_{\dmr[zcolor]{j_\sN}}}$は$j_1,j_2,\cdots,j_\sN$が$1,2,\cdots,N$の置換でない限り0になる(添字が同じ値になると、行列式の反対称性から0)。
この置換が偶置換なら結果は$\det\Kakko{\vec A_1,\vec A_2,\cdots,\vec A_\sN}$になり、奇置換なら結果は$-\det\Kakko{\vec A_1,\vec A_2,\cdots,\vec A_\sN}$となるから、 \begin{align} \det\kakko{\mt{AB}}= \gunderbrace{ \sum_{\dum{j_1},\dum[ycolor]{j_2},\cdots\dum[zcolor]{j_\sN}=1}^N B_{1\dml{j_1}}B_{2\dml[ycolor]{j_2}}\cdots B_{\sN\dml[zcolor]{j_\sN}}\epsilon_{\dmr{j_1}\dmr[ycolor]{j_2}\cdots\dmr[zcolor]{j_\sN}}}_{\det\mt{B}} \det\Kakko{\vec A_{1},\vec A_{2},\cdots,\vec A_{\sN}} \end{align} となり、証明された。
2次元平面を直交座標$(\xcol{x},\ycol{y})$で表したときの微小体積は$\coldx\coldy$だが、極座標$(\rcol{r},\thetacol{\theta})$で表したときの微小体積は$\rcol{r}\coldr\coldtheta$である。これは
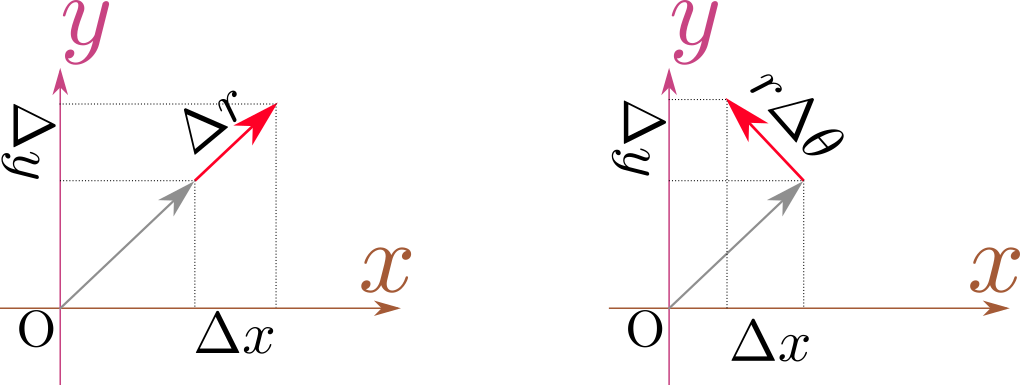
のように図を描いて \begin{align} \Delta x=&\Delta r\cos \theta- \rcol{r}\Delta\theta\sin\theta\\ \Delta y=&\Delta r\sin \theta+ \rcol{r}\Delta\theta\cos\theta \end{align} という関係があること(図は$\Delta r$のみがあるときと$\rcol{r}\Delta\theta$のみがあるときを表現しているが、両方があるときは和になる)を読み取り、さらにそれを行列で \begin{align} \mtx[c]{\Delta x\\ \Delta y}=\mtx{\cos \theta & -\rcol{r}\sin\theta\\ \sin \theta&\rcol{r}\cos \theta}\mtx[c]{\Delta r\\ \Delta \theta} \end{align} と表現した後でこの行列の行列式を考える。すると、面積(2次元体積)の比が、$\rcol{r}$であることがわかる。