「物理数学Ⅰ」2021年度講義録第9回
前回の感想・コメントシートから
前回の授業の「感想・コメント」の欄に書かれたことと、それに対する返答は、
にありますので見ておいてください。
前回までで行列式・逆行列を使って連立方程式を解く話をしました。少し物理よりに話をシフトして、今日は「回転」を行列で表す話をしましょう。
2次元平面でのベクトルの回転
図形で考えるベクトルの回転
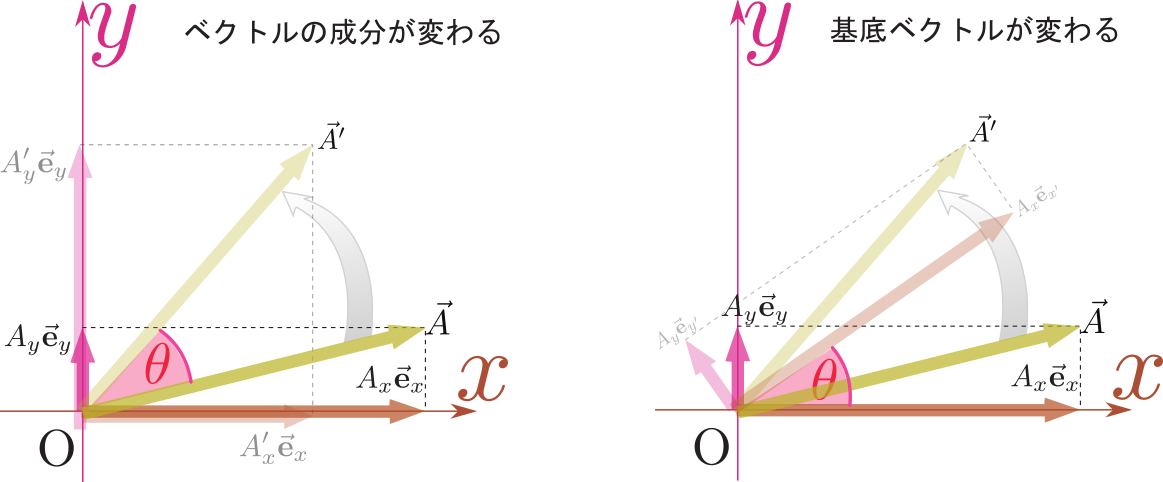
ここでは、2次元平面の上でベクトル$\vec A$を角度$\thetacol{\theta}$だけ回転させたベクトル$\vec A'$をどのように作れば(あるいは数式上で表現すれば)よいかということを考えよう。図で描くならば
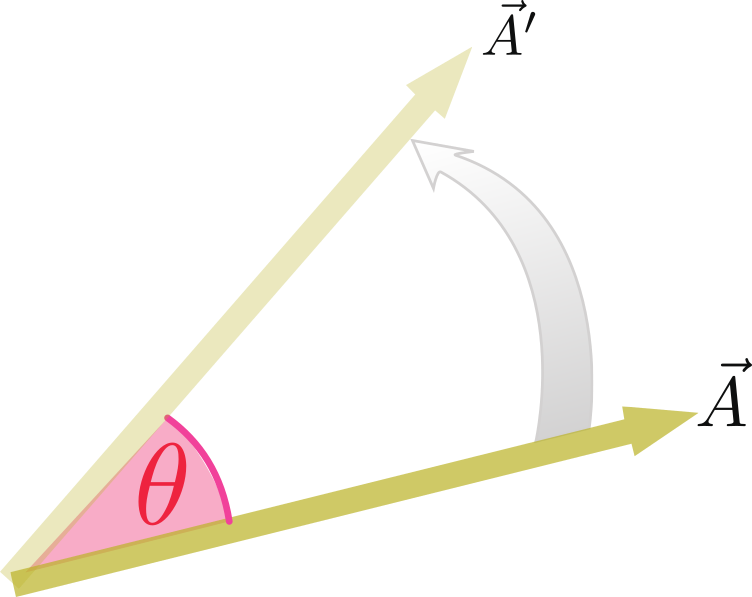
のような状況である。
最初に一つ確認しておくが、この回転の操作を$R\kakko{\vec A}$のように表したとき、この$R\kakko{\vec A}$は線形写像である。
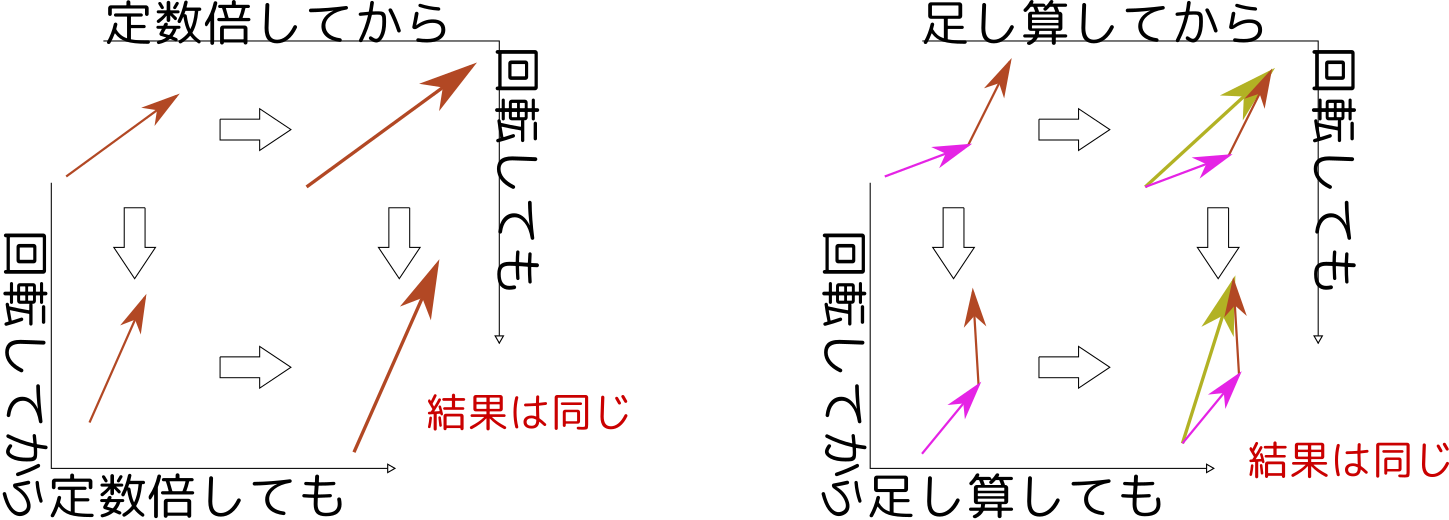
すなわち、 \begin{align} R\kakko{\lambda_1\vec A_1+\lambda_2\vec A_2} =\lambda_1 R\kakko{\vec A_1}+\lambda_2 R\kakko{\vec A_2} \end{align} が成り立つ。ゆえに行列で表現できる。
ここで行う回転は、実際に平面上にあるベクトルが向きを変えるという、物理的現象である。
わざわざこう断ったのは、物理的実体は変化しない単なる座標変換も「回転」という言葉を使って表現することがあるからである。
回転を数式の上ではどのように扱うべきかを解説する。
ベクトルの回転を表現してみよう。 回転を実現するには、
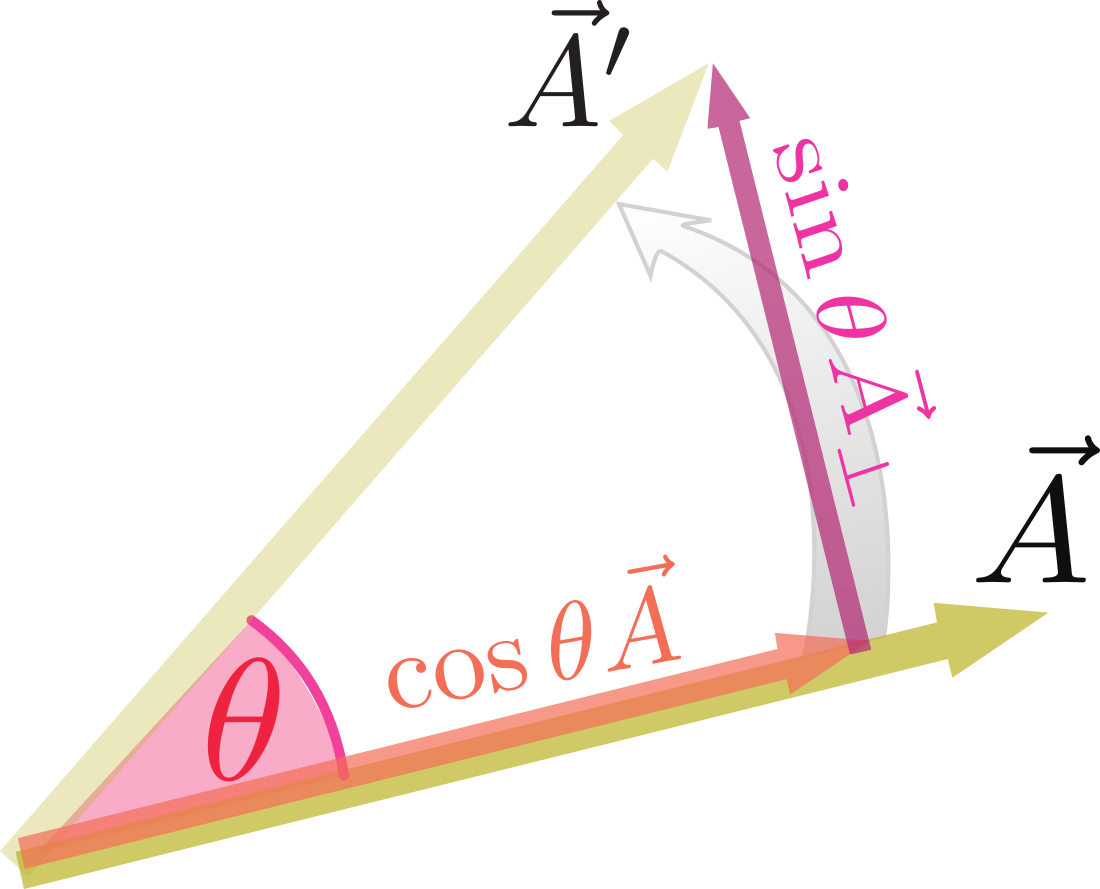
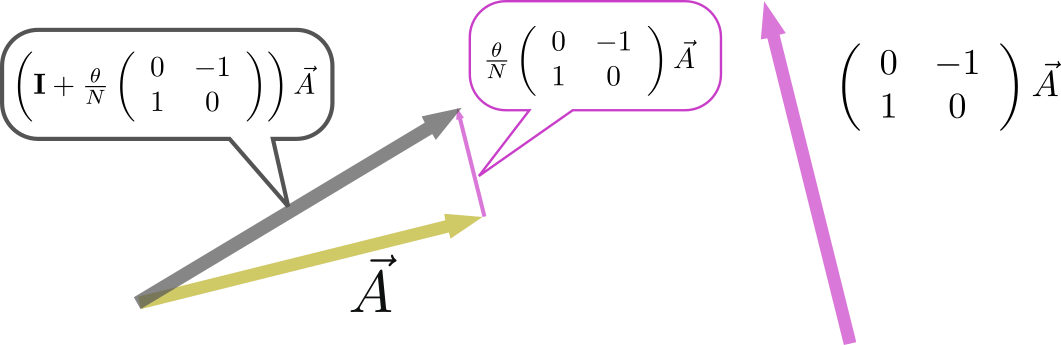
のように、元のベクトルの長さを$\cos \thetacol{\theta}$倍にしたもの($\cos\thetacol{\theta}\vec A$)に、元のベクトルを90度(${\pi\over 2}$rad)倒して(このベクトルを${\vec A_{\Lsh}}$と書くことにする)長さを$\sin \thetacol{\theta}$倍にした、$\sin\thetacol{\theta}\vec A_{\Lsh}$を足す、という操作を行う。
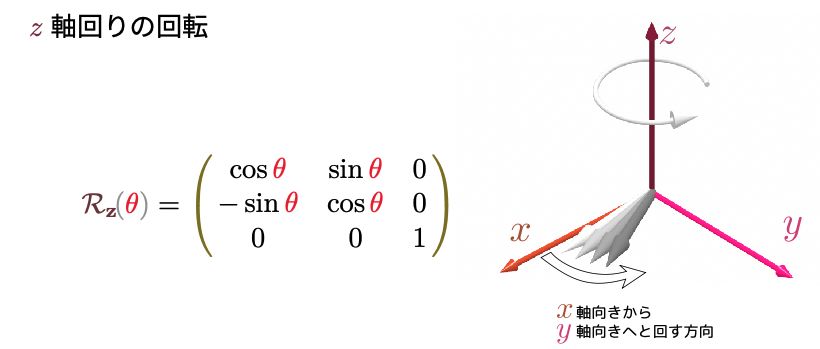
ここでは90度倒すことを表す記号を「$\Lsh$」にした(一般的な記号ではない)。倒す方向は、反時計回り。平面の回転では「正の回転」を反時計回り、「負の回転」を時計回りとすることが多い。北極側から見た地球の自転は反時計回りで、正の回転である。
そこでまず反時計周りの90度(${\pi\over 2}$rad)回転を考えることにしよう。
$\vec A_{\Lsh}$の成分を
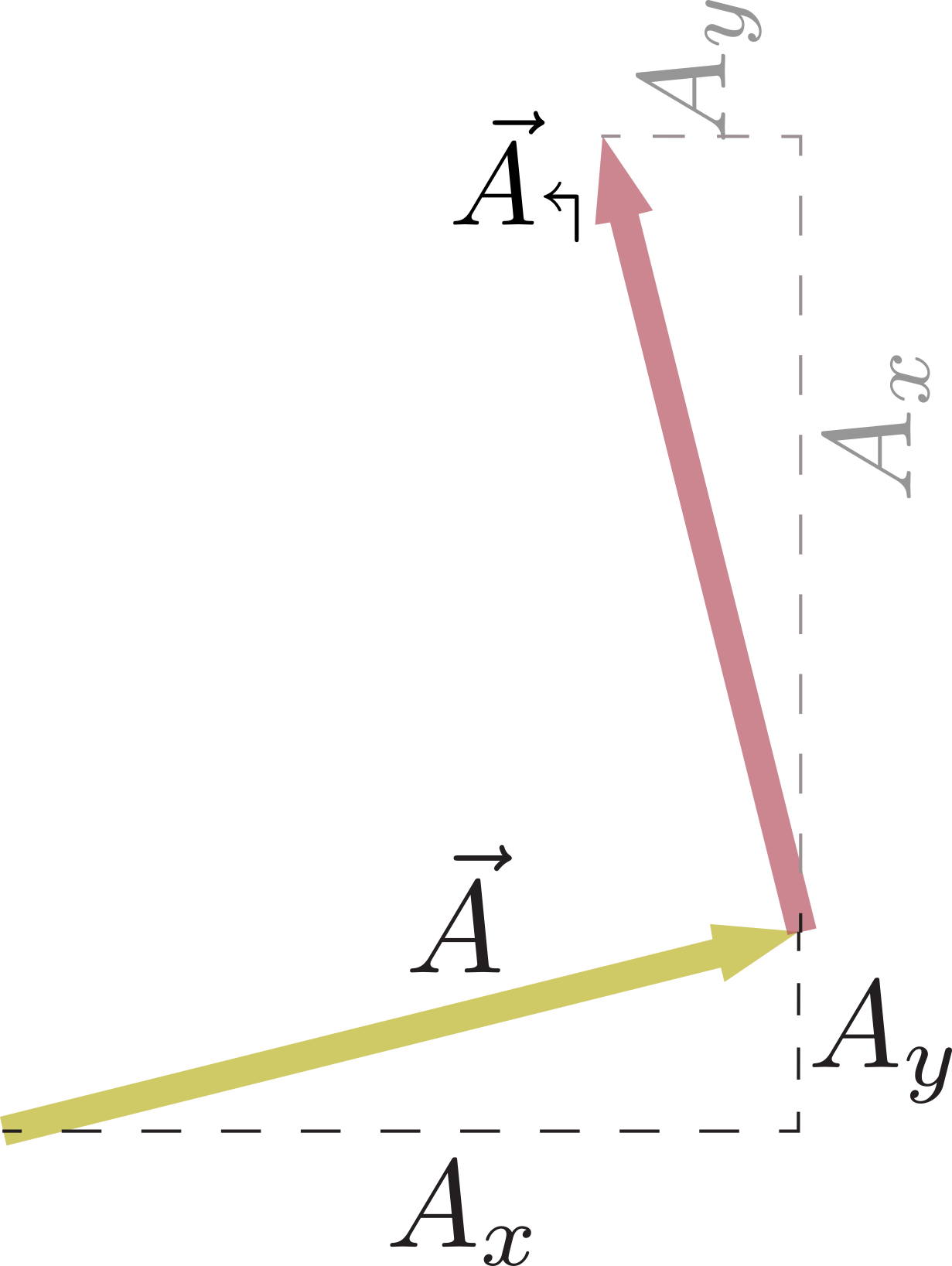
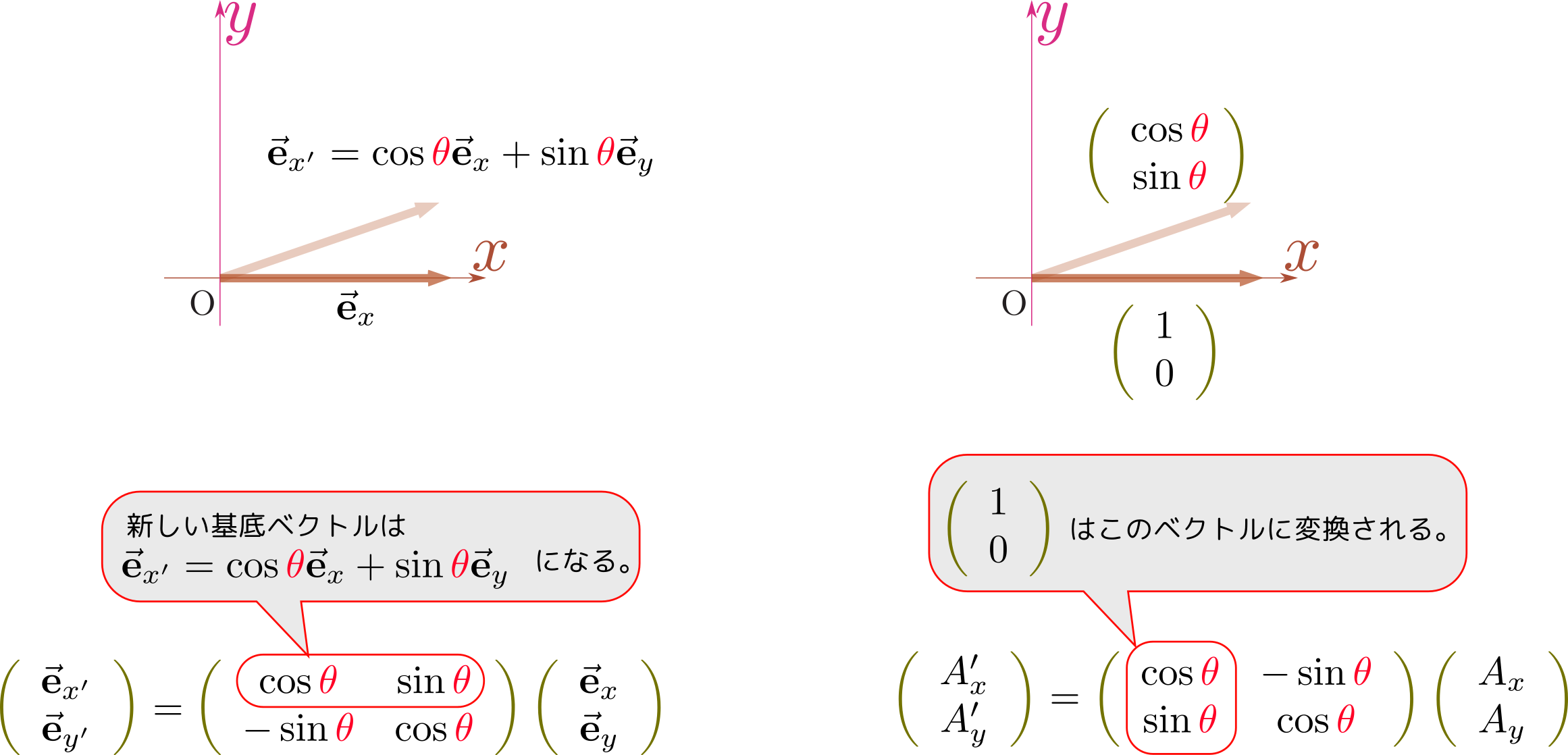
のように考えることで、「回転後の$\xcol{x}$成分は元の$\ycol{y}$成分($A_y$)の符号を変えたもの、回転後の$\ycol{y}$成分は元の$\xcol{x}$成分($A_x$)」という関係がわかる。「回転後のベクトルを、古い座標系でみたときの成分」が並ぶ位置が二つの変換では違うのである。
この1枚の図だけでそれを言って大丈夫なのか、と心配な人は何枚も図を描いてどのような場合でもこうなることを確認しよう。
すなわち成分の変化は$\mtx[c]{A_x\\A_y}\to \mtx[c]{-A_y\\A_x}$であり、回転の結果は \begin{equation} \vec A_{\Lsh}=\goverbrace{-A_y}^{A_x\to}\ve_x+\goverbrace{A_x}^{A_y\to}\ve_y\label{chokkakukaiten} \end{equation} である。
あるいはこれを
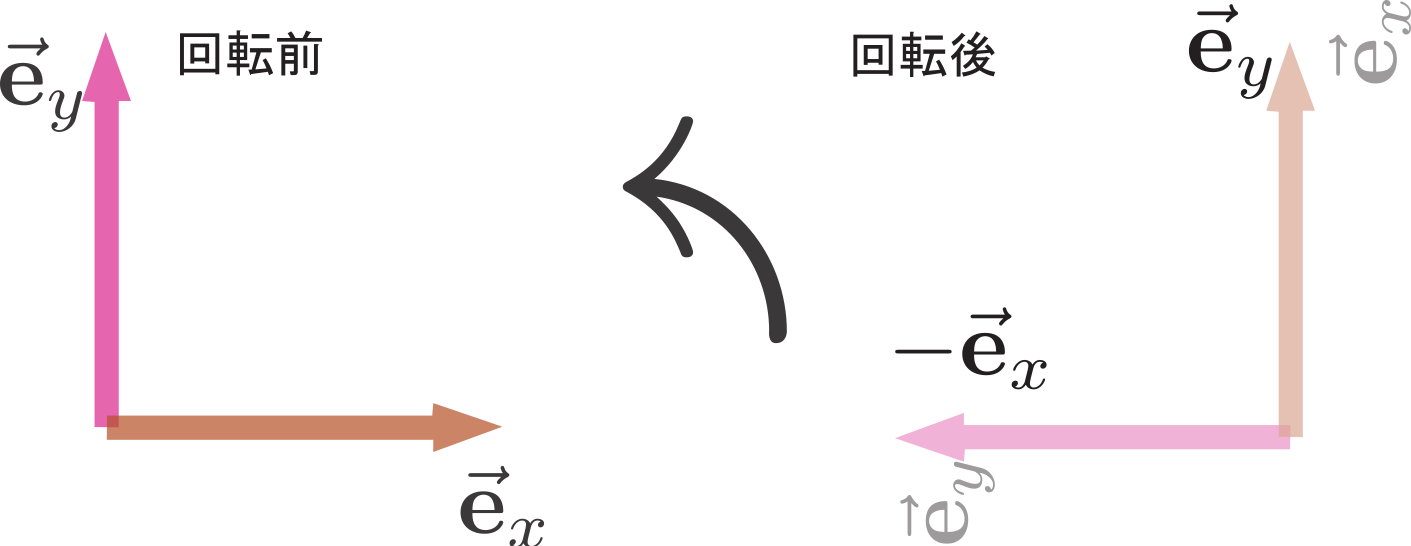
のように、$\mtx[c]{\ve_x\\\ve_y}\to \mtx[c]{\ve_y\\ -\ve_x}$という置き換えをした結果ベクトルが回転したと考えてもよい。
$\mtx[c]{A_x\\A_y}\to \mtx[c]{-A_y\\A_x}$と$\mtx[c]{\ve_x\\\ve_y}\to \mtx[c]{\ve_y\\ -\ve_x}$で符号の付く位置が違うことに注意(だが、これでいい)。
こう考えても結果は \begin{equation} \vec A_{\Lsh}=A_x\goverbrace{\ve_y}^{\ve_x→}+A_y\goverbrace{(-\ve_x)}^{\ve_y→}=-A_y\ve_x+A_x\ve_y \end{equation} となる。
${\pi\over 2}$の回転は上の通りであったので、角度$\theta$の回転を「元のベクトル$\vec A$の$\cos\thetacol{\theta}$倍に、$\vec A_{\Lsh}$の$\sin\thetacol{\theta}$倍を足す」という操作で実現してみると、 \begin{align} \mtx[c]{A'_x\\A'_y} =&\cos \thetacol{\theta}\goverbrace{\mtx[c]{A_x\\A_y}}^{\vec A}+\sin\thetacol{\theta}\goverbrace{\mtx[c]{-A_y\\A_x}}^{\vec A_{\Lsh}} \nonumber\\ =&\mtx[cc]{\cos \thetacol{\theta}&0\\0&\cos\thetacol{\theta}}\mtx[c]{A_x\\A_y}+ \mtx[cc]{0&-\sin\thetacol{\theta}\\\sin \thetacol{\theta}&0}\mtx[c]{A_x\\A_y}\nonumber\\ =& \mtx{\cos\thetacol{\theta}&-\sin \thetacol{\theta}\\\sin \thetacol{\theta}&\cos\thetacol{\theta}}\mtx[c]{A_x\\A_y} \label{seibunrot} \end{align} となる。
加法定理
角度$\thetacol{\theta}$の回転を行ってから角度$\phicol{\phi}$の回転を行うという操作は(2次元で考える限り)「角度$\thetacol{\theta}+\phicol{\phi}$の回転」と同じ操作である。「行列は操作を表現したもの」なので、「二つの操作の合成」は行列の掛算で計算できる。やってみると、 \begin{align} & \mtx{ \cos \phicol{\phi}&-\sin\phicol{\phi}\\ \sin \phicol{\phi}&\cos\phicol{\phi} } \mtx{ \cos \thetacol{\theta}&-\sin\thetacol{\theta}\\ \sin \thetacol{\theta}&\cos\thetacol{\theta} }\nonumber\\ =&\mtx{ \cos \phicol{\phi}\cos\thetacol{\theta} -\sin \phicol{\phi}\sin\thetacol{\theta}& -\cos \phicol{\phi}\sin\thetacol{\theta} -\sin \phicol{\phi}\cos\thetacol{\theta}\\ \sin \phicol{\phi}\cos\thetacol{\theta} +\cos \phicol{\phi}\sin\thetacol{\theta}& \cos \phicol{\phi}\cos\thetacol{\theta} -\sin \phicol{\phi}\sin\thetacol{\theta} }\nonumber\\ =& \mtx{ \cos (\thetacol{\theta}+\phicol{\phi})&-\sin(\phicol{\phi}+\thetacol{\theta})\\ \sin (\thetacol{\theta}+\phicol{\phi})&\cos(\phicol{\phi}+\thetacol{\theta}) } \end{align} となって、三角関数の加法定理が出てくる。
また、この結果を見ると、
- 「角度$\thetacol{\theta}$の回転を行ってから角度$\phicol{\phi}$の回転を行う」
- 「角度$\phicol{\phi}$の回転を行ってから角度$\thetacol{\theta}$の回転を行う」