合成関数・逆関数
関数は「数→数」の対応関係であるが、この対応関係を二段階にしたもの「数→数→数」を合成関数と呼ぶ。y=x2というx→yという対応関係があり、さらにz=sinyというy→zの対応関係があれば、この二つをまとめて、z=sinx2というx→zという「合成関数」を作ることができる。
たとえば、ある気体を電気ヒーターで暖めているとしよう。ヒーターの電力を変えれば温度が変わる(電力→温度)。そして、温度が変わればその気体中の音速が変わる(温度→音速)。こうすると「電力を変えれば(温度の変化を通じて)音速が変わる」(電力→温度→音速)という関数関係ができることになる(こういう例を自分でも考えてみよう)。
二つの関数をy=f(x)(yがxの関数である)および$z=g(y)(zがyの関数である)と書けば、合成関数はz=g(f(x))のように書ける(この式の意味は「まずf(x)を計算して、計算結果をg(y)のyに代入すると、zが求められる」ということだ)。
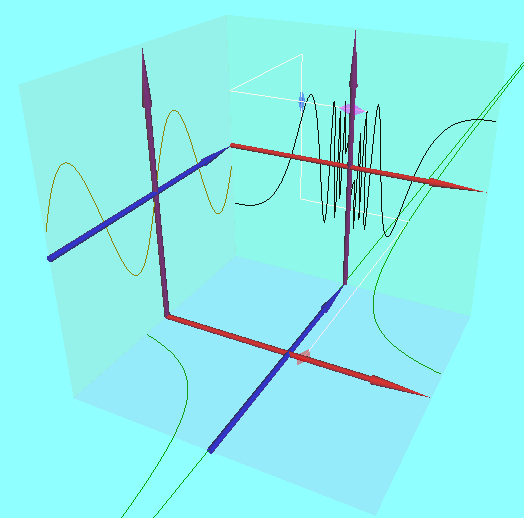
三つの変数が関与する関数なので、立体的に図を描くと次のようになる。
ここでは、
y=xという関数と
z=yという関数が合成され、
z=(x)という関数になっている。
◆や◆や◆のような形が走り回っているが、これはx,y,zの変化を表したものである。
- y=x2とz=
を合成すると、z=1
y1
x2 - y=x2とz=exp(-y)を合成すると、z=exp(-x2)
- y=sin(x)とz=y2を合成すると、z=sin(x)2
のように関数が合成されるところを確認しよう(もちろん他にももっといろいろなパターンがあるので、試してみよう)。
コンピュータにグラフを描かせる時の注意
たとえば、
| 1 x |
| 3 x |
のようになる。このx=0付近のぐしゃっとなっているところ は、実は無限回の振動が隠れているなぜ無限回振動するのか、考えてみよう!。しかしコンピュータの画面も内部での計算でも「無限回の振動」を表すようにはできていない。実際にはxを0.01とか0.02とか、小さなステップで増加させては線を引く、というのを繰り返している。そのステップとステップの間に関数が激しく振動してしまうと、描かれたグラフは正確なものにはならないのである。
は、実は無限回の振動が隠れているなぜ無限回振動するのか、考えてみよう!。しかしコンピュータの画面も内部での計算でも「無限回の振動」を表すようにはできていない。実際にはxを0.01とか0.02とか、小さなステップで増加させては線を引く、というのを繰り返している。そのステップとステップの間に関数が激しく振動してしまうと、描かれたグラフは正確なものにはならないのである。
逆関数のペア
これらの関数は互いに逆関数になっているペアがある。それらを確認しよう。
上の図ではx→y→zという合成関数を考えているが、2個めのy zが1個めのx yの逆関数であるので、x→y→xというつながりで元に戻ってくる。
よって、正しく逆関数になっていれば、z=xになるはずだ。
- y=axの逆関数はx=by(ただし、a=
)。1
b - y=
の逆関数はx=a
x
。a
y - y=x2の逆関数はx=√(
)|y|
a - y=sin(ax)の逆関数はx=
arcsin(y)
a - y=exp(ax)の逆関数はx=log(
)|y|
a
ただし、実際やってみるとわかるように、これらは全てがちゃんとした逆関数にはなっていない。たとえばy=x2という関数はxが正でも負でも結果のyは正になる。そして、x=√|y|)の結果はどちらにしろ正の数になる。よって、x<0である状況では「xの符号を外す(絶対値を取る)」ということをしてしまって、逆関数にならないじゃあどうなるか、は上で確認すべし!。
同じような状況が他の場合でも起こり、上の例が逆関数になっていると言ってよいxの範囲は制限されることになる。これも、確認しよう。