三角形の辺の比による三角関数の定義
三角関数というのは「角度→直角三角形の辺の比」という関数としてまず定義される。つまり、「直角三角形の角度を一つ決めると、辺の比が決まる」という関係が「三角関数」である。理工学では、角度は「度」ではなく一周を$2\pi$とする角度がよく使われることが多い。
この角度の単位は「rad」と書いて「ラジアン」である。

一周を2πラジアンとすると何が都合がいいかというと、半径r、頂角θの扇形の弧の長さが rθとなり、計算が楽になる(円は頂角2πの扇形と考えれば、その弧すなわち円周は2πrになる)。特に運動を考えているときは物体の移動する距離(長さ)の計算ができる限り簡単な方がよいので、以後も角度はラジアンを使う。
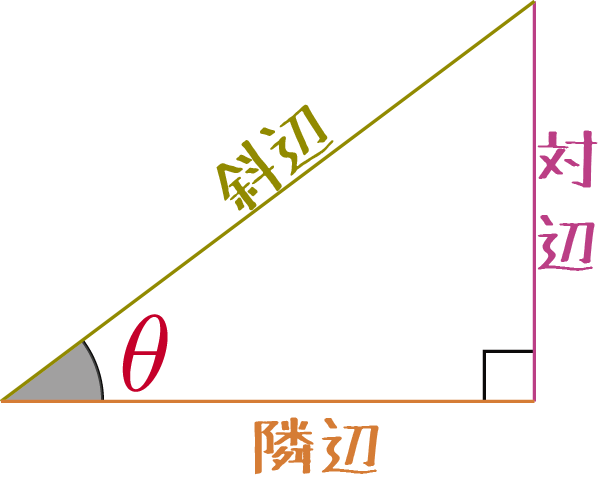
直角三角形の3辺を隣辺、対辺、斜辺と下の図のように名付ける。
この三辺の比は、3×2=6通りの組み合わせがある。それぞれを、
| sinθ= | 対辺
斜辺 | | cosθ= | 隣辺
斜辺 | | tanθ= | 対辺
隣辺 | |
| |
| cosecθ= | 斜辺
対辺 | | secθ= | 斜辺
隣辺 | | cotθ= | 隣辺
対辺 | |
と名付ける。
上の段にある三つが一番よく使われるもので、下の段の三つは対応する上の段の逆数$\left({1\over \sin \theta}={\mathrm c\mathrm o\mathrm s\mathrm e\mathrm c}\,\theta, {1\over \cos \theta}=\sec\theta, {1\over \tan\theta}=\cot\theta\right)$になっている
以下の図の直角三角形はドラッグして動かすことができ、直角以外の頂点を動かすことで変形できる(ただし、天辺の頂点は上下にしか動かないし、底辺のうち直角でない方の点は左右にしか動かない)。点を動かしながら、それぞれの辺の比(sin,cos,tan)がどういう量かを実感しよう。
斜辺を1に固定した直角三角形
下の図は斜辺を1で一定にして角度θを変化させていったときの直角三角形の対辺と隣辺の変化の様子である。斜辺を1とすると対辺の長さは$\sin\theta$、隣辺の長さは$\cos\theta$であるが、角度が大きくなるに従って$\sin\theta$は大きくなり、$\cos\theta$は小さくなる(こうなるのは、$0<\theta<{\pi\over 2}$の範囲に限って考えているからであり、${\pi\over2}$を超えると事情が変わってくる)。
ここでも直角以外の角を結ぶ辺が長さ1となっていて、角度θの角と直角を結ぶ辺長さ$\cos \theta$、それ以外の辺が長さ$\sin\theta$となっている。
, sinθ=, cosθ=
上の図もドラッグで直角三角形を移動・変形できるが、
斜辺の長さは一定になっている。角度と
cosθと
sinθの変化の様子を観察しよう。
sin,cosが正になったり負になったりするが、

から

に向かう方向が「上」「右」の時にsin,cosは正であり、「下」「左」の時にはsin,cosは負である。図ではそれを

や

が鏡文字になることで表現している。

次に、隣辺を一定(1)にした場合に角度を変えると対辺の長さがどのように変わるかを示したのが右の図である。
斜辺の長さは図に示していないが、$\sec\theta={1\over \cos\theta}$であり、θの変化に伴い変化する。
上の定義から、三角関数相互の関係を出してみよう。たとえば、
${{\sin\theta}\over{\cos \theta}}=$(対辺の長さ/斜辺の長さ)/(隣辺の長さ/斜辺の長さ)=
(対辺の長さ/隣辺の長さ)$=\tan\theta$
である。同様に${\cos \theta\over \sin \theta}=\cot\theta$である。
斜辺の長さが1である三角形、隣辺の長さが1である三角形、対辺の長さが1である三角形を書いてみると次の図のようになる(この図の三つの三角形は互いに相似である)。

これらの図に、三平方の定理(ピタゴラスの定理)すなわち
(隣辺の長さ)2+(対辺の長さ)2=(対辺の長さ)2
を適用すると、以下の式が導ける。
三角比と三平方の定理の式
$$
{\cos^2{\theta}}+{\sin ^2{\theta}}={1},~~
{1}+{\tan ^2{\theta}}={{1\over \cos^2{\theta}}}={\sec^2{\theta}},~~
{\cot^2{\theta}} +{1} ={{1\over\sin ^2{\theta}} }={{\mathrm c\mathrm o\mathrm s\mathrm e\mathrm c}^2\,{\theta}}
$$
$({\sin\theta})^2$は$\sin^2\theta$と書くのが昔からの慣習である($\cos$や$\tan$も同様)。$\sin \theta^2$と書いてしまうと、「$\theta^2$という角度の$\sin$」と解釈される。慣れないうちは戸惑うかもしれないが、省略記法というのは「そういうものだ」と思って慣れるしかない。
任意の角度のsin
次に、任意の角度でのsinとcosを以下の図のように定義しよう。ここまでで動かしてみてθという角度の意味はからに向かう方向を表すものであることがわかったと思うので、ここからはを固定して、斜辺にあたる角度の変わる部分の長さを1に固定して考える。
まず、sinθの方だけを考えることにしよう。
↑の棒の角度はドラッグによって変えることができる。
この図の

は半径1の円(単位円)を描いたもので、中心から円周の一点に向かっている棒

の角度に応じて、
sinθの値が決まる。

のように2πより大きい(何周も回る)角度にしたり、

のように負の角度にしたりもできるので、いろいろ変えて状況を確認して欲しい。
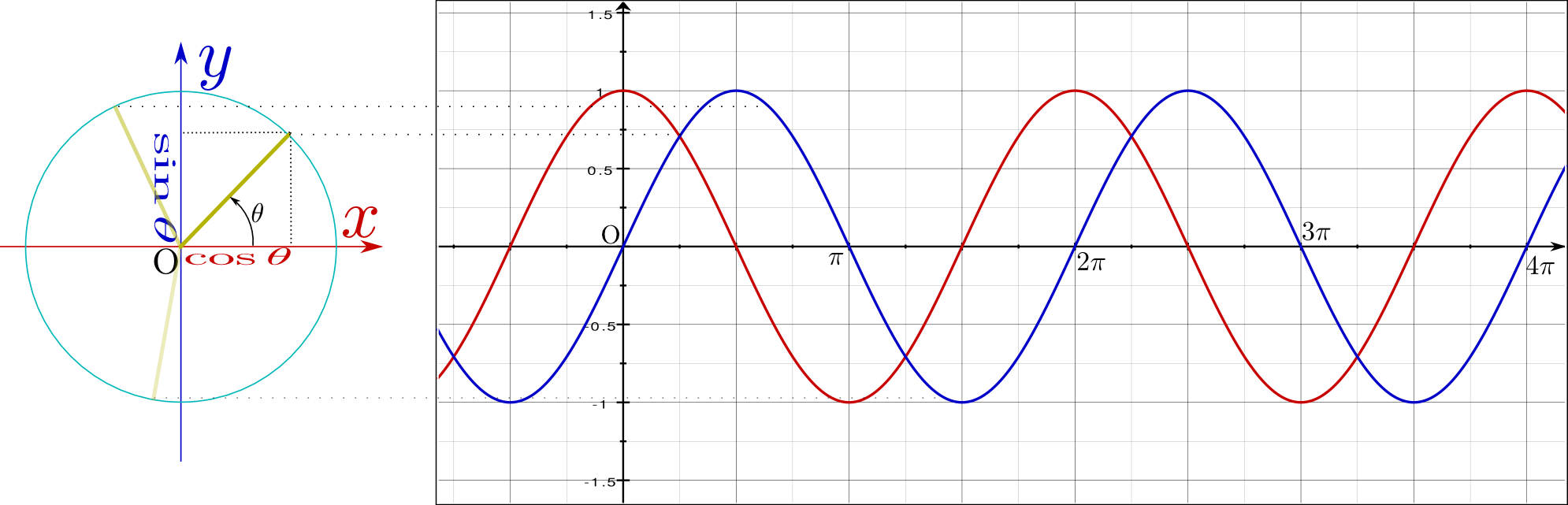
以上で図に描いたように考えることでθが$0<\theta<{\pi\over 2}$でない時も$\sin \theta,\cos \theta$が意味のある量となる。具体的には、下の図のように座標原点に一端を置いた長さ1の棒(これは直角三角形の斜辺を1に固定したことに対応する)をx軸からどれだけの角度回したか、という変数としてθを定義して、棒のもう一端のx座標を$\cos \theta$、y座標を$\sin\theta$と定義するのである。


こうすればθは$2\pi$も超えて$\infty$まで任意の角度を取ることができる。θが$2\pi$を超えた時は、上右の図のように、棒が何周も回ったと考えればよいのである。また、右の図に描いたように、「負の角度」に対しても定義できる。
こうして、任意の実数に対して$\sin \theta,\cos \theta$を定義することができた。グラフで表現すると次のようになる。
三角関数のうち$\sin\theta,\cos \theta$以外の他の4つ($\tan\theta,\sec\theta,{\mathrm c\mathrm o\mathrm s\mathrm e\mathrm c}~\theta,\cot\theta$)に関しては「定義できない値」がある。たとえば$\tan\theta={\sin \theta\over \cos \theta}$は$\cos \theta=0$となる場所では定義できない。
三角関数の間の公式(続)
前ページ同様によくでてくる三角関数の公式として、
がある。これも下の図で遊びながら理解して欲しい。
これが分かれば、
の方も理解できるだろう。
あと一つのよく使う三角関数である$\tan\theta$についても$\sin ,\cos $同様、長さ1の棒を使っての定義とグラフを書いておこう。$\tan\theta$は(の対辺の長さ)/(隣辺の長さ)と定義したから、「隣辺の長さを1にした時の対辺の長さ」と考えればよい。よって下の図左側に描いたように、隣辺を1にして、(つまり、棒の長さをそれに応じて変えつつ)角度θを変化させ、その時の三角形の対辺の長さを$\tan\theta$とする。ただしこの手順では「棒」が左を向いた時には(図で点線で表現したように)斜辺を逆に伸ばして三角形を作る(こうすることでちゃんと$\tan\theta={\sin \theta\over \cos\theta}$が成立するようになる)。
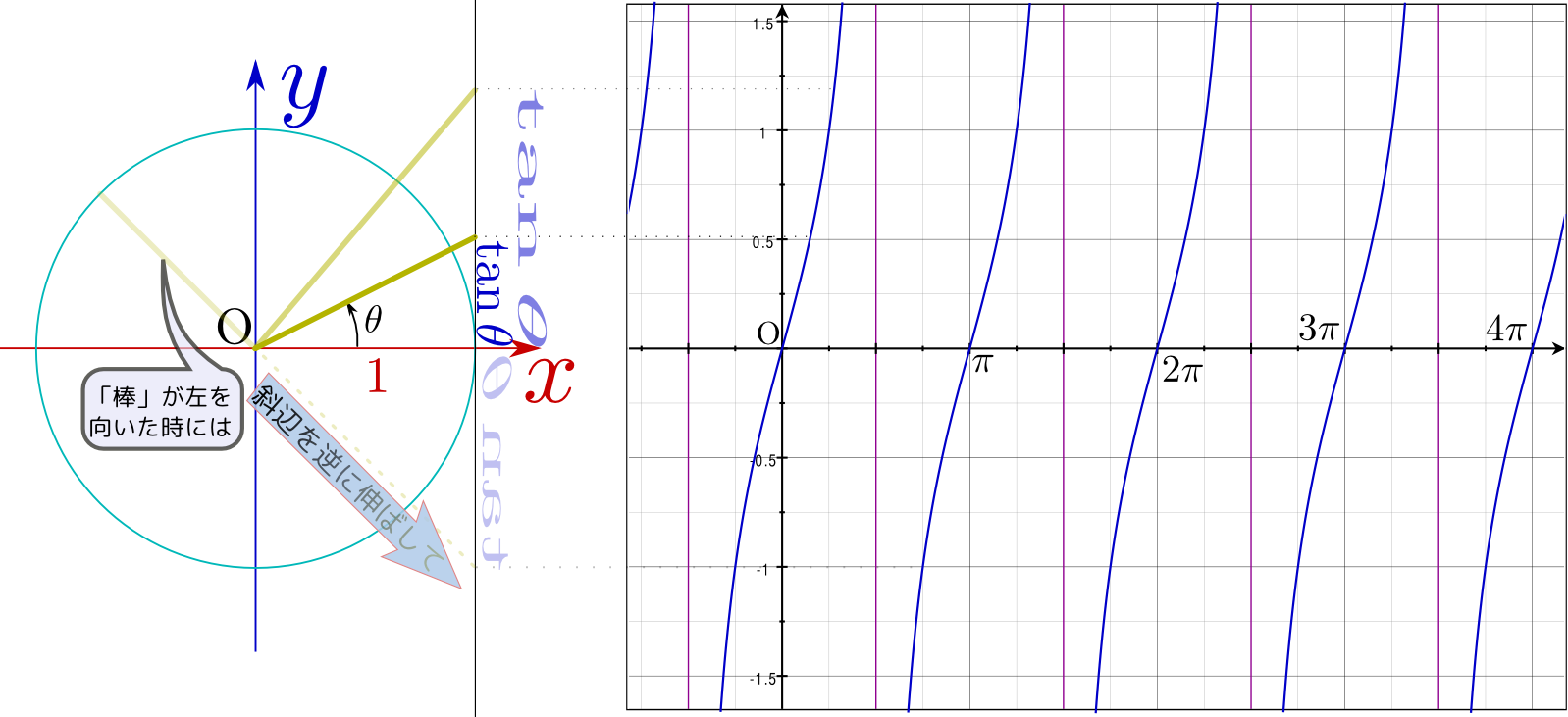
上でも述べたように、$\tan\theta$は$\theta={\pi\over 2}+n\pi$(これは$\cos\theta=0$となる場所)では定義できない。同様に${\mathrm c\mathrm o\mathrm s\mathrm e\mathrm c}~\theta={1\over \sin\theta}$は$\theta=n\pi$では定義できず、$\sec\theta={1\over \cos\theta}$は${\pi\over 2}+n\pi$では定義できない。

これらの定義から、nを整数として「θに$2\pi$を何回足しても、すなわち棒を一周あるいは複数回だけ回しても、$\sin \theta$や$\cos \theta$の値は変わらない」ということ
$$
\sin (\theta+2n\pi)=\sin \theta,~~~
\cos (\theta+2n\pi)=\cos \theta
$$
および、「θにπを何回足しても、すなわち棒を半周もしくはその整数倍回だけ回しても、$\tan\theta$の値は変わらない」ということが結論できる。
$$
\tan (\theta+n\pi)=\tan \theta
$$
 のようにθが直角より大きくなり「
のようにθが直角より大きくなり「 のようにθが負になり「
のようにθが負になり「 の部分の薄い色になっている
の部分の薄い色になっている の方が、θよりπラジアン(180度)大きい角度の場合の「長さ1の棒」になっている。sin,cosがπ足されることでどう変化するかを、図から読み取っていけば、公式が作られる(この公式は式として覚えようとしなくても、意味を考えればすぐにわかる)。
の方が、θよりπラジアン(180度)大きい角度の場合の「長さ1の棒」になっている。sin,cosがπ足されることでどう変化するかを、図から読み取っていけば、公式が作られる(この公式は式として覚えようとしなくても、意味を考えればすぐにわかる)。